Rice/TMC Open House
Immediately following the conference closing on the afternoon of February 26, attendees are invited to an open house demonstration of related research at Rice University, UT Medical School Dept of Physical Medicine and Rehabilitation, TIRR-Memorial Hermann Research Center, and MITIE (Methodist Institute for Technology, Innovation, and Education).
The tours will feature research at Rice University including robot motion planning, swarm robotics, haptics, robot-assisted rehabilitation, and a chance to see Rice's Oshman Engineering Design Kitchen (OEDK), which fosters hands-on undergraduate design experiences at Rice, including several teams discussing their projects which relate to the themes of HS2014. Additionally, the tours will feature research and clinical activities related to rehabilitation after neurological injury (TIRR-Memorial Hermann and UT PM&R), and surgical robotics and surgical training (MITIE).
Light refreshments and bus transfer from and back to the conference venue (about 15 minutes each way) will be provided.
Tour/Demo Descriptions
Rice University
Mechatronics and Haptic Interfaces (MAHI) Lab - See and feel the MAHI EXO-II, a robot designed for rehabilitation of wrist function after stroke, and explore haptic feedback for grasp and lift tasks in smart prosthetic hands.
 Multi-Robot Systems Lab (MRSL) - The main concern of MRSL is on distributed algorithms for multi-robot systems, with a focus on both algorithm and systems design. Our long-term goals are to understand computation on multi-robot systems in theory and in practice. Especially, we design and build hundreds of low-cost multi-robot system, named "r-one".
Multi-Robot Systems Lab (MRSL) - The main concern of MRSL is on distributed algorithms for multi-robot systems, with a focus on both algorithm and systems design. Our long-term goals are to understand computation on multi-robot systems in theory and in practice. Especially, we design and build hundreds of low-cost multi-robot system, named "r-one".
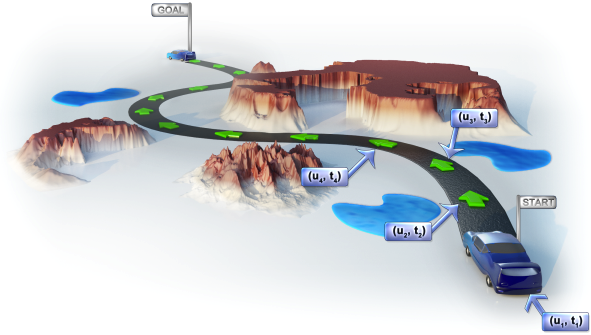 Kavraki Lab - Sampling-based planning algorithms are effective at planning feasible motions for high-dimensional robotic systems subject to complex constraints. The Open Motion Planning Library is a software library developed by the Kavraki group that contains implementations of many sampling-based algorithms. It is widely used on many different robot hardware platforms. Dr. Mark Moll will demonstrate the capabilities of this library and explain some of the basic ideas behind sampling-based planning.
Kavraki Lab - Sampling-based planning algorithms are effective at planning feasible motions for high-dimensional robotic systems subject to complex constraints. The Open Motion Planning Library is a software library developed by the Kavraki group that contains implementations of many sampling-based algorithms. It is widely used on many different robot hardware platforms. Dr. Mark Moll will demonstrate the capabilities of this library and explain some of the basic ideas behind sampling-based planning.
Oshman Engineering Design Kitchen (OEDK) - The OEDK is a space for students to design and prototype solutions to engineering problems. This stop will feature senior design projects related to haptics and robotics, including a device to capture and analyze motion data from cerebral palsy patients and a device to feed back proprioceptive information from a prosthetic gripper via skin stretch.

Thanks to the following groups for their support!

![]()


![]()
About Haptics Symposium
For the history and organization of Haptics Symposium, and links to past conferences, at about.hapticssymposium.org
Important deadlines
Paper submission:
September 30, 2013 October 2, 2013 (midnight PDT)
Tutorial / workshop proposals submission:
October 20, 2013
Author notification:
November 20, 2014 November 24, 2014
Camera-ready paper submission:
December 15, 2013
Demo / exhibit submission:
December 15, 2013
Demo notification:
January 5, 2014
Teaser slide submission:
February 10, 2014